Revisão I - Passando o código da CPU para GPU¶
Sistemas de HPC¶
O paralelismo em GPU se diferencia do paralelismo em CPU de várias formas, uma delas está na maneira como solicitamos recursos para o SLURM, primeiro de tudo é importante considerar que não é possível compartilhar o hardware da GPU com outros usuários, uma vez que a GPU é alocada para o seu job, só você terá acesso a GPU, desta forma, você pode alocar completamente a GPU, e esta é um boa prática, aproveitar o máximo possível o potencial da GPU. Para fazer a solicitação de GPU via slurm você precisa:
Carregar os modulos¶
Um sistema de HPC pode ter várias versões de drivers e módulos, é importante prestar atenção em qual versão do modulo você precisa trabalhar para garantir compatibilidade de drivers, para verificar a lista de módulos e drivers disponíveis para uma determinada instalação, utilize o comando:
module avail cuda
cuda, desta forma, podemos visualizar todos os módulos e drivers disponíveis com esta interface
Cluster SDumont
Cluster Franky
Observando as opções disponíveis do cuda, verificamos que a instalação mais atualizada é a cuda/12.6_sequana, no caso do SDumont, no Franky temos apenas a opção cuda/12.8.1.
No Franky use:
module load cuda/12.8.1
No SDumont use:
module load cuda/12.6_sequana
Uma vez carregado o módulo, é possível utilizar as ferramentas desta instalação em todo o ambiente, inclusive nos nós de computação.
Submetendo um job com suporte a GPU¶
Com o srun, você pode solicitar um terminal para executar o seu job de forma rápida, você pode ou não, salvar o output desta execução, se quiser salvar o output, faça a submissão do job desta forma:
srun --partition=gpu --gres=gpu:1 --output=saida.txt ./seu_binario
Esse comando pede ao SLURM que execute imediatamente um programa dentro da partição gpu, reservando uma GPU, e salvando todo o output em saida.txt.
Se você precisa executar um código que vai ficar rodando sem a sua supervisão, é melhor usar o sbatch, pois o sbatch executa em background.
Um sbatch com suporte a GPU seria assim:
#!/bin/bash
#SBATCH --job-name=exemplo_gpu
#SBATCH --output=saida_%j.txt
#SBATCH --time=00:10:00
#SBATCH --gres=gpu:1
#SBATCH --partition=gpu
#SBATCH --mem=1G
module load cuda/12.8.1
./seu_binario
Passando um código sequencial em CPU para GPU usando CUDA¶
Vamos começar com um programa C++ simples que soma os elementos de dois arrays.
#include <iostream>
#include <cmath>
#include <chrono>
using namespace std;
using namespace std::chrono;
// ==========================================================
// FUNÇÃO CPU
// ==========================================================
void compute(int n,
float *out,
float *x,
float *y)
{
for (int i = 0; i < n; i++)
{
float v = x[i] + y[i];
// carga computacional
for (int k = 0; k < 1000; k++)
{
v =
v * 1.00001f +
sqrt(v) +
sin(v);
}
out[i] = v;
}
}
// ==========================================================
// MAIN
// ==========================================================
int main()
{
// ------------------------------------------------------
// TAMANHO DO VETOR
// ------------------------------------------------------
int N = 10'000'000;
// ------------------------------------------------------
// ALOCA MEMÓRIA
// ------------------------------------------------------
float *x = new float[N];
float *y = new float[N];
float *out = new float[N];
// ------------------------------------------------------
// INICIALIZA DADOS
// ------------------------------------------------------
for (int i = 0; i < N; i++)
{
x[i] = 1.0f + i * 0.000001f;
y[i] = 2.0f + i * 0.000001f;
}
// ------------------------------------------------------
// INÍCIO DA MEDIÇÃO
// ------------------------------------------------------
auto start =
high_resolution_clock::now();
// ------------------------------------------------------
// EXECUTA COMPUTAÇÃO
// ------------------------------------------------------
compute(N, out, x, y);
// ------------------------------------------------------
// FIM DA MEDIÇÃO
// ------------------------------------------------------
auto stop =
high_resolution_clock::now();
double elapsed =
duration<double, milli>(
stop - start
).count();
// ------------------------------------------------------
// OUTPUT
// ------------------------------------------------------
cout << "Tempo CPU: "
<< elapsed
<< " ms"
<< endl;
cout << "out[0] = "
<< out[0]
<< endl;
cout << "out[N-1] = "
<< out[N - 1]
<< endl;
// ------------------------------------------------------
// LIBERA MEMÓRIA
// ------------------------------------------------------
delete[] x;
delete[] y;
delete[] out;
return 0;
}
Primeiro, compile e execute esse programa C++. Coloque o código acima em um arquivo e salve como compute.cpp, e então compile com o compilador C++.
g++ compute.cpp -o comp_cpu
Depois execute:
srun --partition=gpu ./comp_cpu
Para passa esse código para a GPU, primeiro, precisa transformar a função compute em uma função que a GPU pode executar, chamada de kernel em CUDA. Para fazer isso, é preciso adicionar o especificador global à função, o que diz ao compilador CUDA C++ que essa é uma função que roda na GPU e pode ser chamada a partir de código da CPU.
__global__
void computeGPU(int n,
float *d_out,
float *d_x,
float *d_y)
{
// índice global da thread
int i = blockIdx.x * blockDim.x + threadIdx.x;
// evita acessar posições inválidas
if (i < n)
{
float v = x[i] + y[i];
// carga computacional
for (int k = 0; k < 1000; k++)
{
v =
v * 1.00001f +
sqrtf(v) +
sinf(v);
}
out[i] = v;
}
}
Essa função global é conhecida como kernel CUDA e roda na GPU. Código que roda na GPU é frequentemente chamado de device code, enquanto código que roda na CPU é chamado de host code.
Até agora, os arrays x, y e sum existem apenas na memória da CPU (host).
A GPU possui sua própria memória, chamada de device memory, separada da RAM principal do computador.
Por isso, antes de executar o kernel, precisamos:
- alocar memória na GPU;
- copiar os dados da CPU para a GPU.
Primeiro criamos ponteiros que irão apontar para memória no device (GPU):
float *d_x;
float *d_y;
float *d_out;
Agora usamos cudaMalloc, que funciona de forma parecida com malloc em C.
A sintaxe é:
cudaMalloc(&ponteiro, tamanho_em_bytes);
Então fica:
cudaMalloc(&d_x, N * sizeof(float));
cudaMalloc(&d_y, N * sizeof(float));
cudaMalloc(&d_out, N * sizeof(float));
Com este comando, a GPU reserva espaço na VRAM, mas esses dados ainda estão vazios.
Agora precisamos copiar os arrays da CPU (x e y) para a memória da GPU (d_x e d_y).
Isso é feito com cudaMemcpy. A Sintaxe é:
cudaMemcpy(destino, origem, bytes, direção);
Então fica:
cudaMemcpy(d_x, x, N * sizeof(float),
cudaMemcpyHostToDevice);
cudaMemcpy(d_y, y, N * sizeof(float),
cudaMemcpyHostToDevice);
| Parâmetro | Significado |
|---|---|
d_x |
destino na GPU |
x |
origem na CPU |
N * sizeof(float) |
quantidade de bytes |
cudaMemcpyHostToDevice |
direção da cópia |
Agora que os dados já estão na GPU, precisamos dizer:
- quantas threads serão criadas;
- como essas threads serão organizadas;
- quantos elementos cada thread irá processar.
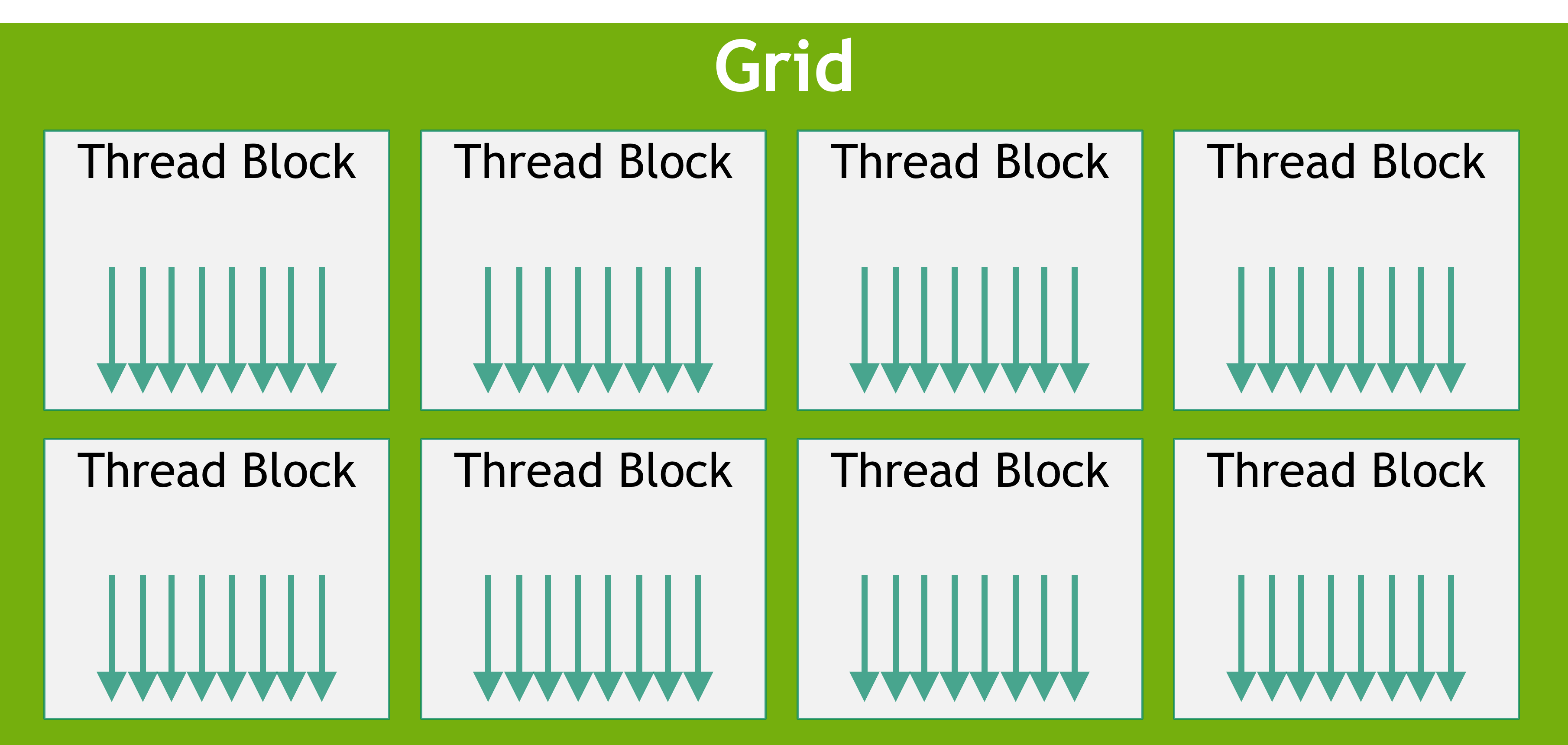
Em CUDA, as threads são organizadas em:
THREADS → dentro de BLOCOS
BLOCOS → dentro de uma GRID
A hierarquia fica assim:
GRID
├── BLOCO 0
│ ├── thread 0
│ ├── thread 1
│ ├── thread 2
│ └── ...
│
├── BLOCO 1
│ ├── thread 0
│ ├── thread 1
│ └── ...
│
└── ...
Se quisermos que, por exemplo, 1 thread fique responsável por 1 posição do vetor
Por exemplo:
| Thread | Elemento processado |
|---|---|
| thread 0 | soma posição 0 |
| thread 1 | soma posição 1 |
| thread 2 | soma posição 2 |
| ... | ... |
Podemos adotar esta configuração muito comum em CUDA:
int threadsPerBlock = 256;
Isso significa:
cada bloco terá 256 threads
Então valores como:
- 128
- 256
- 512
costumam funcionar muito bem.
Agora precisamos descobrir quantos blocos são necessários para cobrir todo o vetor
Se temos N = 1.000.000 elementos e 256 threads por bloco, então precisamos dividir:
Mas precisamos tomar cuidado:
- a divisão pode não ser exata;
- podemos precisar de um bloco extra.
Por isso usamos:
int blocksPerGrid =
(N + threadsPerBlock - 1)
/ threadsPerBlock;
A fórmula:
faz um arredondamento para cima.
Isso garante que sempre haverá threads suficientes
Agora precisamos lançar o kernel.
A sintaxe é:
kernel<<<n_blocos, n_threads>>>();
No nosso caso:
compute<<<blocksPerGrid, threadsPerBlock>>>( N, d_sum, d_x, d_y );
Se:
blocksPerGrid = 256
threadsPerBlock = 3907
Então a GPU criará:
Cada thread:
- calcula seu índice
i; - lê
d_x[i]; - lê
d_y[i]; - soma os valores;
- escreve em
d_sum[i].
Só falta mais uma coisa: preciso que a CPU espere até que o kernel esteja terminado antes de acessar os resultados (porque lançamentos de kernel CUDA não bloqueiam a thread da CPU que o chamou). Para isso, basta chamar cudaDeviceSynchronize() antes visualizar os resultados.
Depois do kernel terminar, precisamos trazer o resultado para a CPU.
cudaMemcpy(out, d_out, N * sizeof(float), cudaMemcpyDeviceToHost);
Assim como usamos delete ou free na CPU, precisamos liberar a memória da GPU usando cudaFree.
cudaFree(d_x);
cudaFree(d_y);
cudaFree(d_out);
Arquivos CUDA têm a extensão .cu. Então salve esse código em um arquivo chamado compute.cu
O código completo:
#include <iostream>
#include <cmath>
#include <chrono>
using namespace std;
using namespace std::chrono;
// ==========================================================
// KERNEL CUDA
// ==========================================================
__global__
void computeGPU(int n,
float *d_out,
float *d_x,
float *d_y)
{
// índice global da thread
int i = blockIdx.x * blockDim.x + threadIdx.x;
// evita acessar posições inválidas
if (i < n)
{
float v = x[i] + y[i];
// carga computacional
for (int k = 0; k < 1000; k++)
{
v =
v * 1.00001f +
sqrtf(v) +
sinf(v);
}
out[i] = v;
}
}
// ==========================================================
// MAIN
// ==========================================================
int main()
{
// ------------------------------------------------------
// TAMANHO DO VETOR
// ------------------------------------------------------
int N = 10'000'000;
size_t size = N * sizeof(float);
// ------------------------------------------------------
// DADOS CPU
// ------------------------------------------------------
float *x = new float[N];
float *y = new float[N];
float *out = new float[N];
// ------------------------------------------------------
// INICIALIZA DADOS
// ------------------------------------------------------
for (int i = 0; i < N; i++)
{
x[i] = 1.0f + i * 0.000001f;
y[i] = 2.0f + i * 0.000001f;
}
// ------------------------------------------------------
// DADOS GPU
// ------------------------------------------------------
float *d_x;
float *d_y;
float *d_out;
cudaMalloc(&d_x, size);
cudaMalloc(&d_y, size);
cudaMalloc(&d_out, size);
// ------------------------------------------------------
// COPIA CPU -> GPU
// ------------------------------------------------------
cudaMemcpy(d_x,
x,
size,
cudaMemcpyHostToDevice);
cudaMemcpy(d_y,
y,
size,
cudaMemcpyHostToDevice);
// ------------------------------------------------------
// CONFIGURA KERNEL
// ------------------------------------------------------
int threadsPerBlock = 256;
int blocks =
(N + threadsPerBlock - 1)
/ threadsPerBlock;
// ------------------------------------------------------
// INÍCIO DA MEDIÇÃO
// ------------------------------------------------------
auto start =
high_resolution_clock::now();
// ------------------------------------------------------
// EXECUTA KERNEL
// ------------------------------------------------------
computeGPU<<<blocks, threadsPerBlock>>>(
N,
d_out,
d_x,
d_y
);
// espera GPU terminar
cudaDeviceSynchronize();
// ------------------------------------------------------
// FIM DA MEDIÇÃO
// ------------------------------------------------------
auto stop =
high_resolution_clock::now();
double elapsed =
duration<double, milli>(
stop - start
).count();
// ------------------------------------------------------
// COPIA GPU -> CPU
// ------------------------------------------------------
cudaMemcpy(out,
d_out,
size,
cudaMemcpyDeviceToHost);
// ------------------------------------------------------
// OUTPUT
// ------------------------------------------------------
cout << "Tempo GPU: "
<< elapsed
<< " ms"
<< endl;
cout << "out[0] = "
<< out[0]
<< endl;
// ------------------------------------------------------
// LIBERA MEMÓRIA GPU
// ------------------------------------------------------
cudaFree(d_x);
cudaFree(d_y);
cudaFree(d_out);
// ------------------------------------------------------
// LIBERA MEMÓRIA CPU
// ------------------------------------------------------
delete[] x;
delete[] y;
delete[] out;
return 0;
}
Compile com o nvcc, o compilador CUDA C++.
nvcc compute.cu -o comp_gpu
srun --partition=gpu --gres=gpu:1 ./comp_gpu
Isso é apenas o primeiro passo, com o código em GPU podemos usar técnicas de otimização para melhorar ainda mais o desempenho do código, porém, iremos veremos sobre isso na próxima revisão.
Exercícios — Passando Código Sequencial da CPU para GPU com CUDA¶
A ideia desses exercícios é praticar:
- criação de kernels CUDA;
- paralelismo com threads;
cudaMalloc;cudaMemcpy;- configuração de grids e blocos;
- execução de kernels.
Exercício 1 — Multiplicação de Vetores¶
Passe a função multiply para um kernel CUDA, faça a alocação e a cópia dos dados para a GPU corretamente, e crie o lançador do kernel multiply:
Código base:
#include <iostream>
void multiply(int n, float *a, float *b, float *out)
{
for(int i = 0; i < n; i++)
out[i] = a[i] * b[i];
}
int main()
{
int N = 1'000'000;
float *a = new float[N];
float *b = new float[N];
float *out = new float[N];
for(int i = 0; i < N; i++) {
a[i] = 2.0f;
b[i] = 4.0f;
}
multiply(N, a, b, out);
std::cout << out[0] << std::endl;
delete[] a;
delete[] b;
delete[] out;
}
Exercício 2 — Soma de Matrizes¶
Paralelize a soma de matrizes em GPU passando a função matrixAdd para um kernel Cuda, faça a alocação, a cópia dos dados para a GPU corretamente, e crie o lançador do kernel.
#include <iostream>
void matrixAdd(int n, float *A, float *B, float *C)
{
for(int i = 0; i < n*n; i++)
C[i] = A[i] + B[i];
}
int main()
{
int N = 1024;
float *A = new float[N*N];
float *B = new float[N*N];
float *C = new float[N*N];
for(int i = 0; i < N*N; i++) {
A[i] = 1.0f;
B[i] = 2.0f;
}
matrixAdd(N, A, B, C);
std::cout << C[0] << std::endl;
delete[] A;
delete[] B;
delete[] C;
}
Exercício 3 — Threshold em Imagem¶
Paralelize a operação threshold em GPU passando a função para um kernel Cuda, faça a alocação, a cópia dos dados para a GPU corretamente, e crie o lançador do kernel.
#include <iostream>
void threshold(unsigned char *in,
unsigned char *out,
int n,
int T)
{
for(int i = 0; i < n; i++)
{
out[i] =
(in[i] > T) ? 255 : 0;
}
}
int main()
{
int N = 1920 * 1080;
unsigned char *img =
new unsigned char[N];
unsigned char *out =
new unsigned char[N];
for(int i = 0; i < N; i++)
img[i] = rand() % 256;
threshold(img, out, N, 128);
std::cout << (int)out[0]
<< std::endl;
delete[] img;
delete[] out;
}
Exercício 4 — Conversão RGB para Escala de Cinza¶
Paralelize a operação rgb2gray em GPU passando a função para um kernel cuda, faça a alocação, a cópia dos dados para a GPU corretamente, e crie o lançador do kernel.
#include <iostream>
void rgb2gray(unsigned char *rgb,
unsigned char *gray,
int n)
{
for(int i = 0; i < n; i++)
{
int idx = i * 3;
float r = rgb[idx];
float g = rgb[idx + 1];
float b = rgb[idx + 2];
gray[i] =
0.299f * r +
0.587f * g +
0.114f * b;
}
}
int main()
{
int N = 1920 * 1080;
unsigned char *rgb =
new unsigned char[N * 3];
unsigned char *gray =
new unsigned char[N];
for(int i = 0; i < N*3; i++)
rgb[i] = rand() % 256;
rgb2gray(rgb, gray, N);
std::cout
<< (int)gray[0]
<< std::endl;
delete[] rgb;
delete[] gray;
}
Desafio Extra¶
Depois de terminar os exercícios:
- compare tempo CPU vs GPU;
-
teste:
-
128 threads;
- 256 threads;
- 512 threads;
- descubra qual configuração é mais rápida.
Referência: https://developer.nvidia.com/blog/even-easier-introduction-cuda/