Robótica Computacional 2025.2 - AF
Instruções para a Parte 1 da Avaliação Final:
- A prova tem duração de 4 horas.
- Inicie a prova no Blackboard para a ferramenta do Smowl ser iniciada.
- O Smowl é obrigatório durante toda a prova.
- Só finalize o Blackboard quando enviar a prova via Github Classroom incluindo o hash do último commit na resposta do Blackboard.
- Durante a prova vamos registrar, a camera, a tela, as páginas visitadas, os acessos online e os registro do teclado.
- Coloque seu
nomeeemailnoREADME.mddo seu repositório. - A prova deverá ser realizada de forma individual.
- Não é permitido consultar a internet, com exceção do site da disciplina, do site "Ferramenta para Ajuste de Máscaras", do
Blackboarde do repositório da avaliação criado através do GitHub Classroom. Não é permitido o uso de ferramentas de **IA** como chatGPT, Copilot, Gemini ou similares durante a prova.Não é permitido o uso de ferramentas colaborativas como Google Docs, Google Slides, ou similares durante a prova.Não é permitido o uso de ferramentas de comunicação como Discord, WhatsApp, Telegram ou similares durante a prova.Não é permitido o uso de editores de codigo com IA como Cursor ou Windsurf durante a prova, sendo permitido apenas o uso do **VSCode**.Não é permitido o uso do Copilot durante a prova. Então desative-o antes de iniciar a prova.Não é permitido o uso de redes sociais, fóruns ou plataformas de comunicação durante a prova.- Faça commits e pushes regularmente de sua avaliação.
- Eventuais avisos importantes serão realizados em sala durante a prova.
- Escreva a frase "robcompehlegal" como a resposta da soma no arquivo
README.mdcomo teste de sua atenção. - A responsabilidade por
infraestrutura,configuraçõesesetupem funcionamento pleno, é de cada estudante. - SÓ SERÃO ACEITOS REPOSITÓRIOS DE ALUNOS QUE ASSINARAM A LISTA DE PRESENÇA.
IMPORTANTE
Após finalizar a prova prática, feche o notebook e pegue com o professor ou monitor uma folha de avaliação para realizar a Parte 2 da Avaliação Final (Avaliação Escrita).
Avaliação Escrita - Parte 2
A avaliação escrita consiste em 2 questões dissertativas sobre um dos dois exercícios que você realizou na Parte 1 (Avaliação Prática). Nesta etapa, você deverá explicar o funcionamento do seu código, por meio de um diagrama ou uma lista numerada (como a que fizemos para o projeto final), detalhando os estados, transições e ações principais do seu nó.
Descreva apenas o que foi implementado no seu código, não o que você gostaria de ter implementado, ou o que estava no enunciado original.
A nota final AF será calculada da seguinte forma: AF = (Nota Q1 Parte 1 * Nota Q1 Parte 2) + (Nota Q2 Parte 1 * Nota Q2 Parte 2)
Rubrica da Avaliação Escrita - Parte 2
Cada questão será avaliada com a seguinte rubrica (0 a 1,05 pontos): * [0] - O diagrama ou lista não representa o funcionamento do código. * [0,5] - O diagrama ou lista representa parcialmente o funcionamento do código, mas os pontos principais estão ausentes ou incorretos. * [1,0] - O diagrama ou lista representa o funcionamento do código. * [1,05] - O diagrama ou lista representa o funcionamento do código, com detalhes adicionais que auxiliam na compreensão do funcionamento do código.
- BOA PROVA!
Atualização do Pacote (ROS 2)
Execute os comandos abaixo para atualizar os pacotes da ros2 obrigatórios para a prova:
cd ~/colcon_ws/src/my_simulation
git stash
git pull
cb
Configuração do Pacote (ROS 2)
-
Preparação Inicial: Primeiro, aceite o convite do GitHub Classroom e clone o repositório dentro da pasta
colcon_ws/src/no seu SSD. -
Criação do Pacote ROS 2: Dentro do diretório do seu repositório, crie um novo pacote chamado
avaliacao_af.- Dica: Para utilizar os módulos desenvolvidos no capitulo 3, inclua o pacote
robcomp_utile o pacoterobcomp_interfacescomo dependência do seu pacote, e então, importe como nos exemplos do capitulo 3.
- Dica: Para utilizar os módulos desenvolvidos no capitulo 3, inclua o pacote
Exercício 0 - Organização & Qualidade
Este exercício avalia a organização e a qualidade dos vídeos dos exercícios e do arquivo README.md.
Critérios de Avaliação:
- O pacote foi corretamente configurado.
- As dependências do pacote estão corretas.
- Os diretórios e arquivos estão organizados de forma adequada.
- Todos os scripts estão na pasta
avaliacao_afdentro do pacoteavaliacao_af. - A configuração dos nós foi realizada corretamente.
- Os nós da ROS 2 foram executados utilizando o comando
ros2 run. - Vídeo: A ação do robô é claramente compreensível pelo vídeo.
- README.md: O link do vídeo foi adicionado corretamente no campo indicado.
- README.md: O arquivo
README.mdcontém o nome completo e o e-mail do estudante.
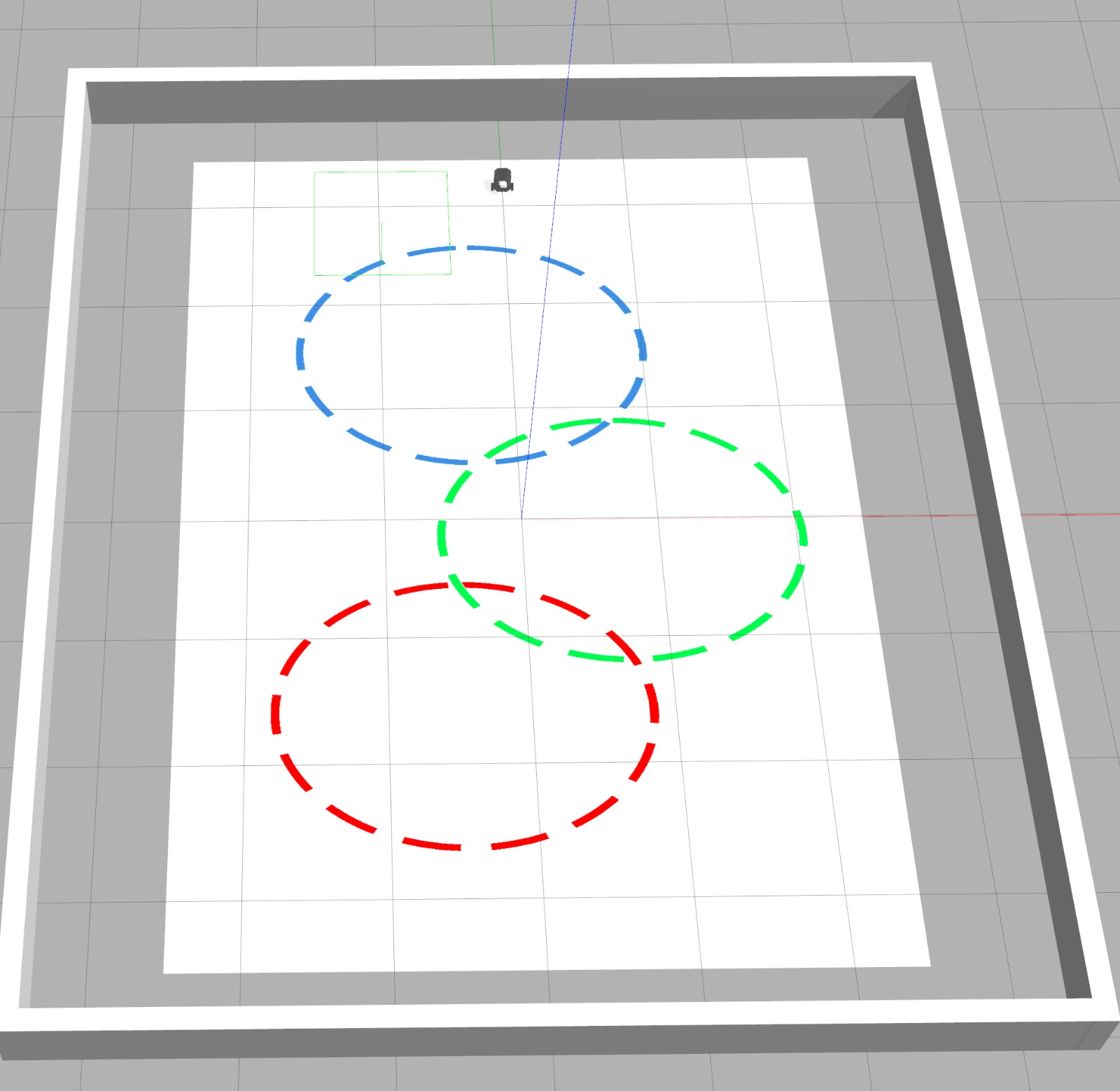
Exercício 1 - Segue Circulos (6)
Baseando-se no código base_control.py do módulo 3, crie um arquivo chamado q1.py contendo uma classe denominada MudaPista. Esta classe deve implementar um nó chamado muda_pista_node, responsável por fazer com que o robô simulado entre na linha vermelha e mude de pista conforme comando de um Orquestrador, seguindo as pistas na ordem: vermelha, verde e azul.
Utilize o comando abaixo para iniciar o simulador no mapa da prova:
ros2 launch my_gazebo pista_circulos.launch.py
O nó criado deve
- avisar que está pronto ao iniciar.
- aguardar o comando de mudar de pista do Orquestrador.
- Ao receber o comando para mudar de pista pela primeira vez, o robô deve entrar na linha vermelha no sentido informado.
- Ao receber o comando para mudar de pista, muda para a próxima pista na ordem (vermelha -> verde -> azul), sempre seguindo no sentido informado eternamente.
- O robô pode andar diretamente até a próxima pista, ignorando as outras pistas no caminho.
- Na pista azul, o robô deve ignorar comandos de mudança de pista e continuar seguindo a pista azul até completar uma volta completa, retornando diretamente para o ponto de início e enviar um comando de pronto novamente para o Orquestrador, repetindo o ciclo eternamente.
Comunicação com o Orquestrador
- Publicar e assinar ao tópico
/controlecom o tiporobcomp_interfaces.msg.MudaPista. - Ao iniciar, publicar READY no campo
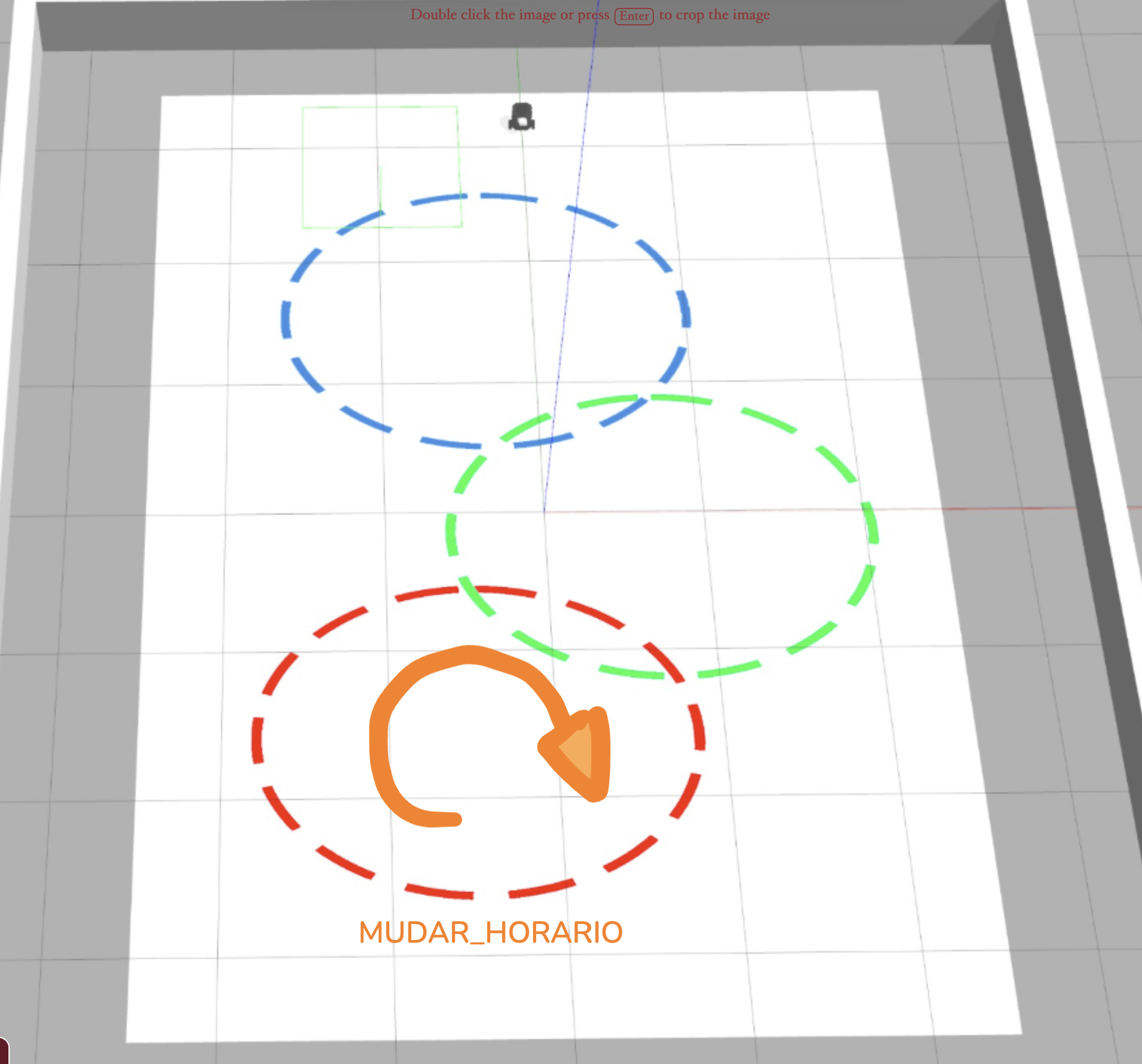
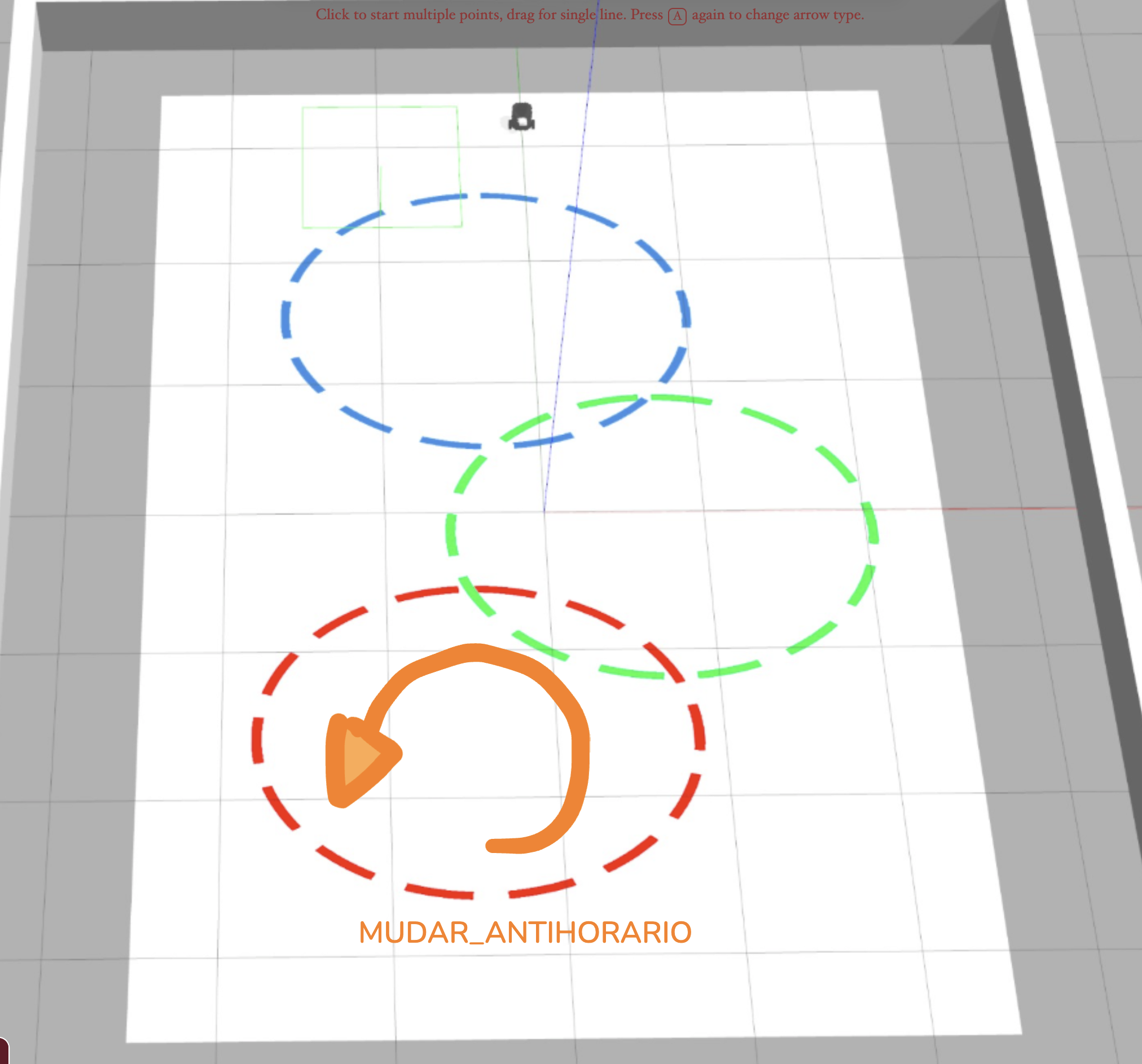
statuscom horário atual e nome do aluno nos campos apropriados. - Ao receber o
statusMUDAR_HORARIO ou MUDAR_ANTIHORARIO, o robô deve mudar de pista conforme o sentido informado. como na imagens a seguir. - Ao completar a volta na pista azul e retornar ao ponto inicial, publicar READY no campo
statusnovamente, repetindo o ciclo.
Requisitos
- Deve existir o arquivo chamado
q1.py. - O programa deve ser executado sem erros.
- A classe deve se chamar
MudaPista. - A implementação deve seguir a estrutura da classe
MudaPista, conforme exemplo nobase_control.py. - A função
controldeve ser a única a publicar no tópico/cmd_vel. - A função
controldeve ser idêntica à do arquivobase_control.py. Todas as decisões de controle devem ocorrer dentro dos nós, sem alterações na funçãocontrol. - Não utilizar loops infinitos ou
sleepdurante o controle do robô.
Rúbrica
- O programa deve respeitar as restrições definidas.
- Nota: +1,0 - [1] & o robô consegue enviar comandos para para o Orquestrador e consegue reconhecer os comandos de mudança de pista.
- Nota: +1,0 - [2] & o robô consegue entrar na pista vermelha, seguindo-a corretamente e mudar para a pista verde conforme o comando recebido.
- Nota: +2,0 - [3] & o robô consegue seguir o fluxo de mudança de pista corretamente, entrando na pista azul, dando a volta completa e retornando ao ponto inicial, reiniciando o ciclo, mas ignora o sentido informado.
- Nota: +2,0 - [4] & o robô consegue seguir o fluxo de mudança de pista corretamente, entrando na pista azul, dando a volta completa e retornando ao ponto inicial, reiniciando o ciclo,obedecendo o sentido informado.
Vídeo
Grave um vídeo mostrando que o robô é capaz de realizar o comportamento completo ou algum comportamento parcial. Publique os vídeos no YouTube e inclua apenas o link no arquivo README.md do seu repositório.
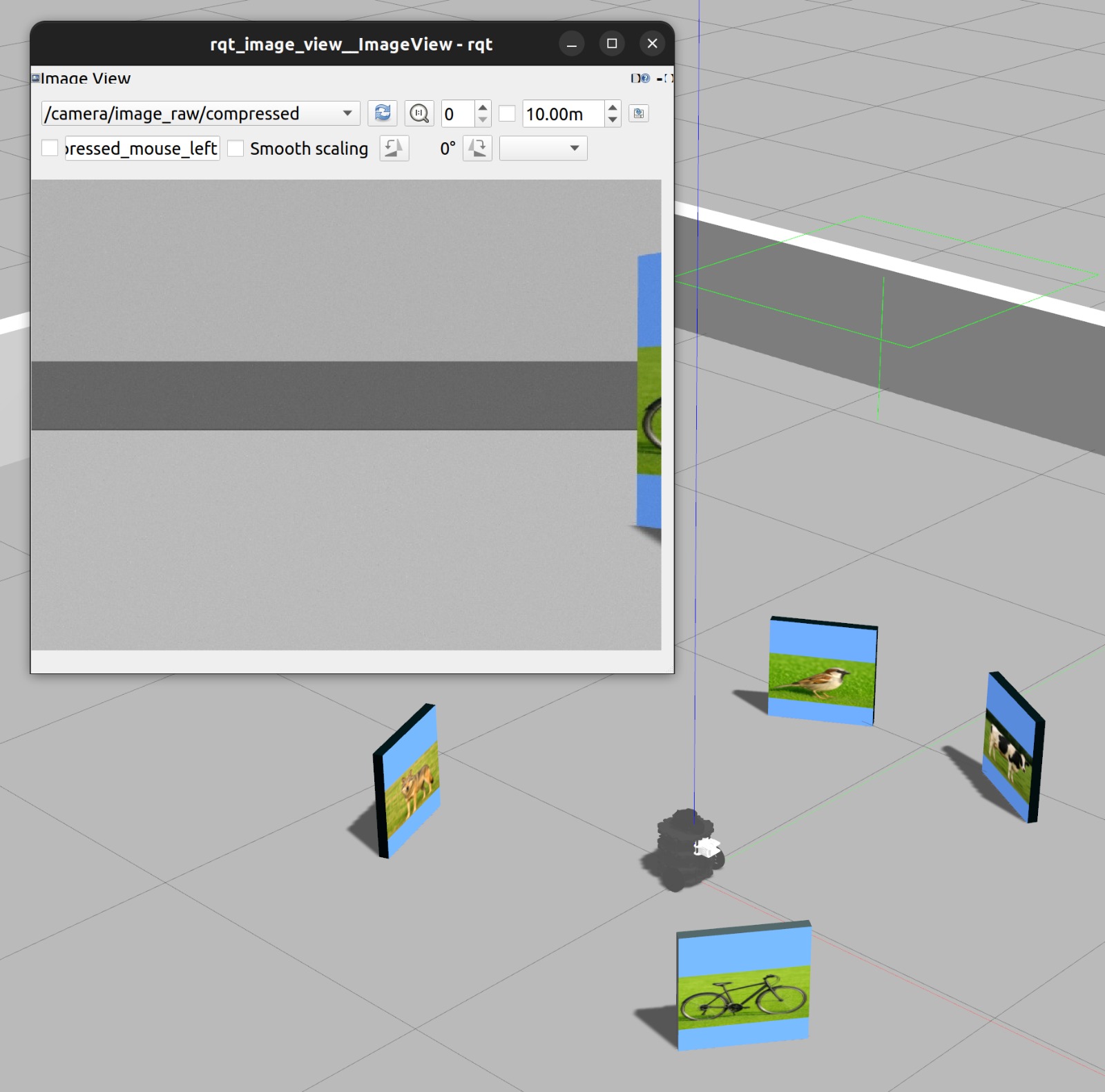
Exercício 2 - Posição Angular de Figuras (4)
Baseando-se no código base_control.py do módulo 3, crie um arquivo chamado q2.py contendo uma classe denominada EstimaPosicao. Esta classe deve implementar um nó chamado estima_posicao_node, responsável por fazer com que o robô simulado execute uma volta completa em torno de seu eixo, reconheça a posição angular das figuras e armazene essas informações em um dicionário.
Utilize o comando abaixo para iniciar o simulador no mapa da prova:
ros2 launch my_gazebo roda.launch.py
O nó criado deve
- girar o robô em torno de seu eixo central até completar uma volta completa (360 graus).
- Durante a rotação, o nó deve coletar a posição angular (em graus, 0 a 360) de cada figura detectada, com a melhor precisão possível.
- O robô deve interromper a rotação, centralizar a figura no campo de visão, PARAR e coletar a posição angular, imprimir a figura e o valor angular em graus, e então continuar a rotação.
- Armazenar as posições angulares em um dicionário, onde as chaves são os nomes das figuras (
"cat","dog","car","bicycle","person") e os valores são as posições angulares em graus. - Após completar a volta, imprimir o dicionário com as posições angulares de cada figura.
Requisitos
- Deve existir o arquivo chamado
q2.py. - O programa deve ser executado sem erros.
- A classe deve se chamar
EstimaPosicao. - A implementação deve seguir a estrutura da classe
EstimaPosicao, conforme exemplo nobase_control.py. - A função
controldeve ser a única a publicar no tópico/cmd_vel. - A função
controldeve ser idêntica à do arquivobase_control.py. Todas as decisões de controle devem ocorrer dentro dos nós, sem alterações na funçãocontrol. - Não utilizar loops infinitos ou
sleepdurante o controle do robô.
Rúbrica
- O programa deve respeitar as restrições definidas.
- Nota: +1,0 - [1] & o robô consegue dar uma volta completo em torno de seu eixo e parar após completar a volta com precisão de 1 grau.
- Nota: +1,5 - [2] & o robô consegue detectar e reconhecer a posição angular das figuras, armazenando corretamente no dicionário e imprimindo os valores. Mas não centraliza as figuras no campo de visão.
- Nota: +1,5 - [3] & ao detectar uma figura, o robô interrompe a rotação, centraliza a figura no campo de visão, claramente PARA, reconhece a posição angular, imprime a figura e o valor angular em graus, e então continua a rotação, armazenando corretamente no dicionário e imprimindo os valores.
Vídeo
Grave um vídeo mostrando que o robô é capaz de realizar o comportamento completo ou algum comportamento parcial, mostrando os valores e a comunicação no terminal. Publique os vídeos no YouTube e inclua apenas o link no arquivo README.md do seu repositório.